WeARDMine cerca demostrar l’ús de robots autònoms millorats (UAV) similars a les unitats portàtils usades al sector miner per augmentar el rendiment en els processos d’inspecció, l’adquisició de dades i la seguretat en diversos casos d’ús.
Sobre WeARDMine
Objectius específics i aplicacions tecnologiques
La principal ambició del projecte WeARDMine és provar l’ús de robots autònoms millorats (UAV) similars a les unitats portàtils usades al sector miner per augmentar el rendiment en els processos d’inspecció, l’adquisició de dades i la seguretat en 4 casos principals :
Missions d’inspecció per facilitar el manteniment basat en la situació.
Missió de patrulla per a la detecció primerenca de riscos;
Desplegament de xarxa de comunicacions en mode eixam i
Resposta primerenca en cas d’emergència per a la salut o la seguretat dels treballadors.
Aquest projecte ha rebut finançament indirecte del programa de recerca i innovació Horitzó 2020 de la Unió Europea, del projecte MINE.THE.GAP.
Objectius generals del projecte
Objectius
El projecte WeARDMine amb una durada d‟un any planteja els objectius específics:
Miniaturitzar i autonomitzar la tecnologia UAV existent utilitzada per Hovering Solutions assegurant-ne la modularitat, funcionalitats autònomes i alta usabilitat.
Maximitzar-ne l’aplicació en 4 casos d’ús de mineria.
Augmentar el coneixement i acceptació dins del sector miner mitjançant la demostració de la solució en un escenari real.
Impacte
El Consorci WeARDMine desenvolupa i avalua la solució, presentant així un conjunt d’eines fiables i utilitzables per inspeccionar espais confinats en una mina (sitges, pous, etc.) reduint les ineficiències de manteniment, evitant accidents i facilitant una resposta primerenca en cas d’incidents /accidents.
Casos d’ús
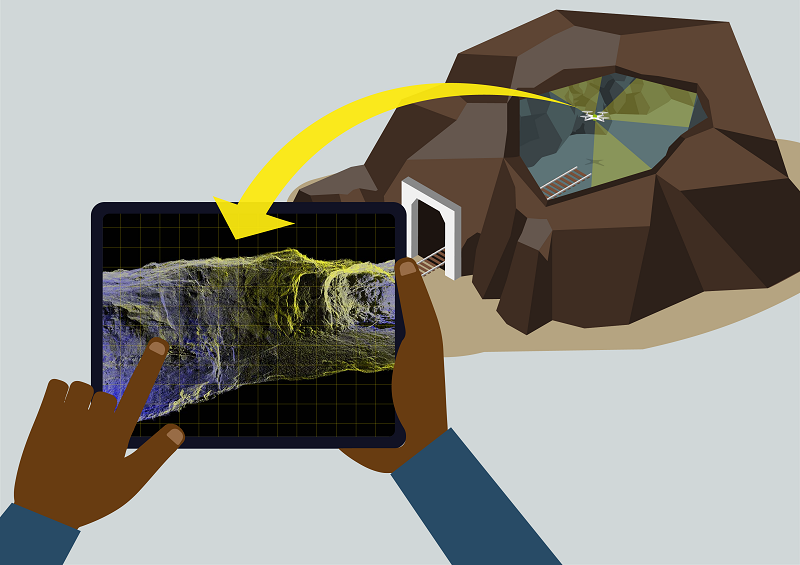
Missions d’inspecció ràpida
L’UAV podrà fer missions d’inspecció ràpida d’una manera molt fàcil i segura, a petició de l’operador, més precisament a:
Missions d’inspecció visual ràpida per comprovar l’estat d’una àrea a un rang de 100 m, enviant imatges a la tauleta de l’operador.
Inspeccions ràpides per verificar si una àrea és potencialment perillosa verificant paràmetres no visuals, per exemple, gasos.
Millora de les comunicacions
Els UAV podran actuar de manera eixam per brindar cobertura de comunicació a la mina.
Mode eixam
Ús col·laboratiu dels robots per brindar una millor cobertura de comunicació a tota la mina a través d’un eixam d’UAV miniaturitzats i estacions d’acoblament.
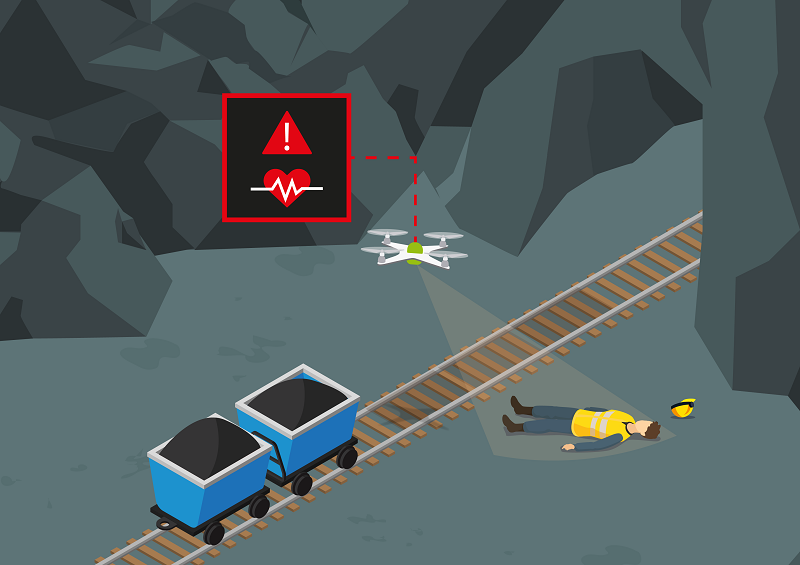
Resposta primerenca en cas d’emergència de salut o seguretat
El UAV miniaturitzat pot ser utilitzat per treballadors de la mina combinat amb altres dispositius portàtils.
Innovacions
Fàcil de transportar i fàcil d’operar
L’UAV ha de ser prou petit i lleuger per permetre que l’operador el transporti fàcilment durant la feina.
Navegació sense molèsties
El sistema UAV s’ha d’integrar dins de l’entorn de la mina, fent accions anticol·lisió si es detecta un risc potencial.
Alarma de detecció i intervenció davant de riscos:
Amb l’UAV com a company de l’operador ha de ser capaç de detectar emergències o riscos per advertir l’operador o cercar ajuda si l’operador sol·licita assistència.
We serve cookies. If you think that's ok, just click "Accept all". You can also choose what kind of cookies you want by clicking "Settings".
Read our cookie policy