The HYBRIS hybrid redox flow (AORFB) and lithium titanate (LTO) battery system uses HIL to test EMS controls safer, faster, and under real site conditions.

Energy storage, and especially battery systems, play a growing role in the energy landscape by providing much needed stability to an energy system that is increasingly dependent on inconsistent energy supply sources. While lithium-ion batteries are the most known, a myriad of different technologies exist that can address these challenges for different use cases, such as peak shaving, frequency regulation, energy arbitration, or backup power in case of grid islanding. Integrating multiple battery technologies into a hybrid battery system provides a unique opportunity to address these cases; gaining the advantages of the high power response of lithium-ion batteries or super-capacitors together with the high energy potential and cycle life of a redox flow battery, for example.
However, site owners and stakeholders are rightly concerned that the battery systems will be safe, while still being effective at meeting the needs of their site. Without many market examples, it can be quite challenging to convince these stakeholders that – especially when developing a first demonstration prototype. The digital twin concept (Figure 1) is one way to do this, allowing site conditions to be tested ahead of deployment. Still, how can we make sure the full control management of the battery system works as expected, under conditions that match those at the site?
Challenges | End-to-end validating the EMS prior to deployment
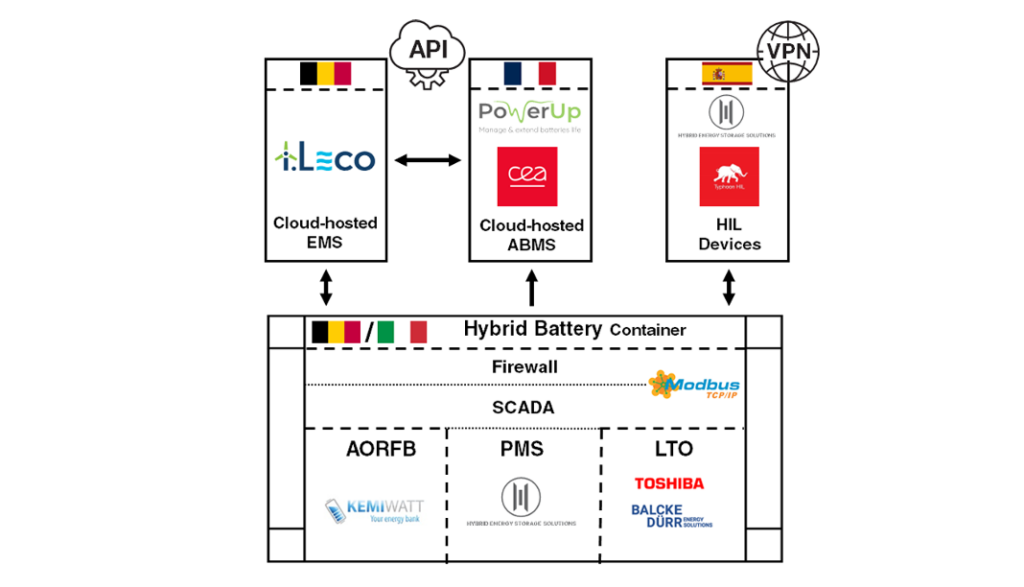
The containerized hybrid battery solution within the HYBRIS H2020 project represents the collective work of several different partners: Kemiwatt’s unique Amorphous Organic Redox-Flow Battery (AORFB) solution; Toshiba’s Lithium Titanate Oxide (LTO) Battery, HESStec’s integrated SCADA solution, AUG-E’s cloud-based Energy Management System (EMS), and PowerUP/CEA’s cloud-based Advanced Battery Managememnt System (ABMS) solution to ensure the long term health of the battery systems. As you may imagine, with so many separate organizations all providing input into the safe battery operation during deployment, good communication becomes even more important. Ensuring consistent communication, and validating what happens when communication is lost or delayed, is critical to making sure the battery functions properly in practice.
It would be great if in this case we could avoid the uncertainties in the testing stages and use the real site conditions as much as possible. Fortunately in HYBRIS, we do! Figure 2 shows the communication model between the cloud-hosted platforms and the real battery container. During real container operation, control commands are sent from AUG-e (formerly i.Leco)’s cloud-hosted EMS and the hybrid battery container, with battery status information sent from the container to both of the cloud-hosted platforms. When real-time testing with the digital twin site model is desired, AUG-e uses the same API infrastructure, but instead commands are redirected from the container to the HIL devices hosted by HESStec (top right of Figure 2). In this way, we can minimize risk by identifying potential communication issues earlier.
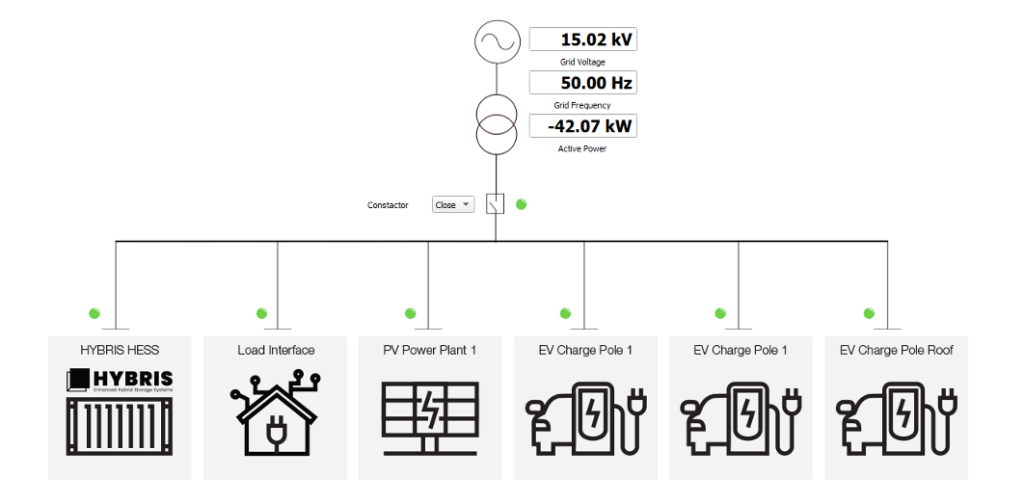
Unfortunately, communication issues aren’t the only challenges we might expect to encounter from the practical application of cloud-based controls. How will the battery respond to changes at the site-level that require a response faster than the cloud can provide? If the grid frequency or reactive power at the site changes, how will the battery respond? How might discharging of power from the battery affect this? What about unintentional islanding events and switching between islanding and grid-following modes? And most importantly, will the battery provide an added value in services that can justify its cost? Testing these questions for the first time with the real battery is risky, especially for a single, full-size prototype intended to be implemented at multiple sites.
Solution | The HYBRIS Hybrid Battery Model
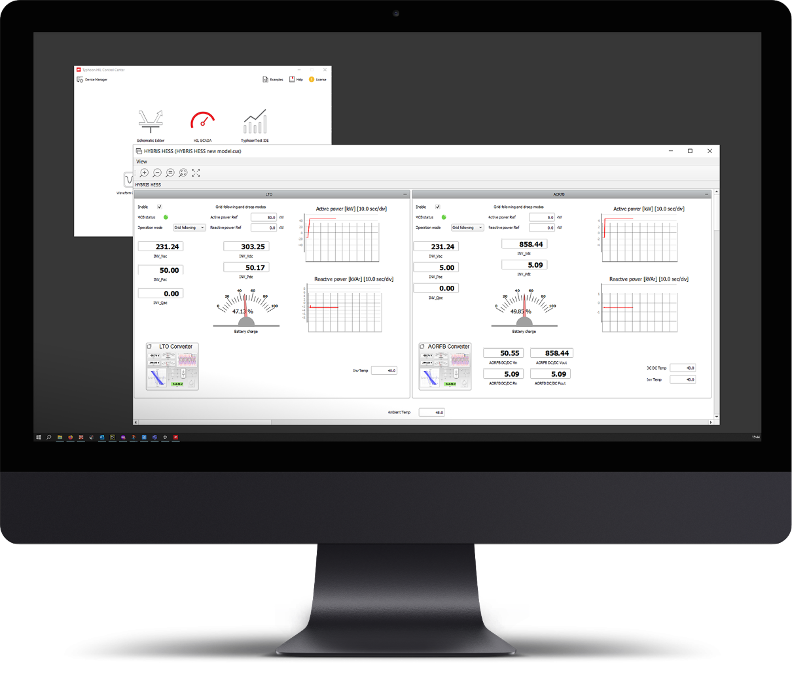
To address these risks, a real-time capable model of the HYBRIS HESS battery container (shown in the bottom left of Figure 1) has been developed that can run on HIL devices both at AUG-e’s premises and using the communication architecture described in Figure 2. This HESS model integrates detailed models of both AORFB and LTO battery systems, together with parameterized Bidirectional Voltage Source Converter (BVSC) components that act as a twin of the real AC-DC converters deployed in the container for each battery technology. Figure 3 shows an example of how Typhoon HIL SCADA represents information on both battery systems. Changes in grid conditions or power references for the container can be implemented directly here in HIL SCADA, via automated test scripts, or via data sent over API.
By setting the grid conditions of a digital twin of the site, test cases can be safely run representing expected or problematic conditions for battery operation. Tests can even be performed for difficult to replicate conditions during real operation, such as how the hybrid system might respond to the failure of one of the two battery systems. Since the digital twin battery model is indistinguishable to real control hardware from the real battery, we remove uncertainty that might arise from simplified controls or unexpected site conditions. Instead of assuming, we can just test it- and reduce the risks to the physical battery itself.
This blog was written as part of the European Union’s H2020 HYBRIS project (GA No. 963652) and originally posted on Typhoon HIL’s website.